
GIS空间数据库(103)时态GIS数据模型
本文对常见的时态GIS的数据模型做一个介绍。
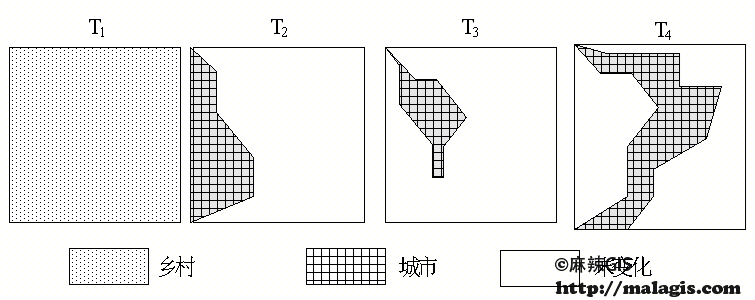
序列快照模型(Sequent snapshots)
连续快照模型是将一系列时间片段快照保存起来,反映整个空间特征的状态,根据需要对指定时间片段的现实片段进行播放。 该模型的不足之处在于,由于快照将未发生变化的时间片段的所有特征重复进行存储,会产生大量的数据冗余,当应用模型变化频繁,且数据量较大时,系统效率急剧下降。 此外,连续快照模型不表达单一的时空对象,较难处理时空对象间的时态关系。
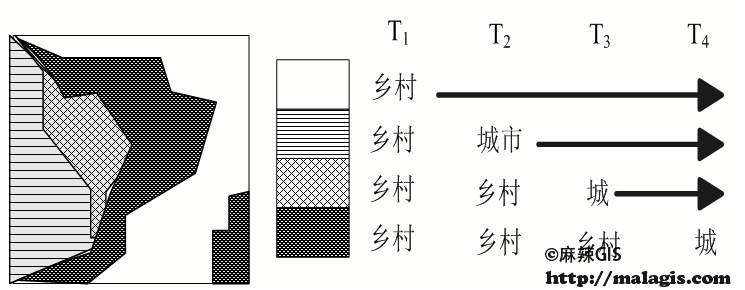
离散格网单元列表模型
Langran(1990)提出的离散格网单元列表模型在一定程度上避免了时间快照序列图像模型的数据冗余问题,该模型将格网单元及其变化以变长列表形式存储,每个格网单元列表的一个元素是对应于该位置上的一次时空变化,因此,格网单元列表存储对应于该单元位置的真实世界状态的完整序列。这样,若想获得当前状态,只需提取每个格网单元列表的每一个元素,还可以通过变化的累加,恢复地学现象的变化过程。图7-11是离散格网单元列表模型的图示。这种模型虽然解决了数据冗余的问题,但由于它仍是基于位置的模型,因此,对于上述基于时间的查询,仍需查询所有位置。

基态修正模型
基态修正模型按事先设定的时间间隔采样,不存储研究区域中每个状态的全部信息,只存贮某个时间的数据状态(称为基态),以及相对于基态的变化量。

时空复合模型(Space-time composite)
时空复合模型将空间分隔成具有相同时空过程的最大的公共时空单元,每次时空对象的变化都将在整个空间内产生一个新的对象。 对象把在整个空间内的变化部分作为它的空间属性,变化部分的历史作为它的时态属性。
时空单元中的时空过程可用关系表来表达,若时空单元分裂时,用新增的元组来反映新增的空间单元,时空过程每变化一次,采用关系表中新增一列的时间段来表达,从而达到用静态的属性表表达动态的时空变化过程的目的。但在数据库中对象标识符的修改比较复杂,涉及的关系链层次很多,必须对标识符逐一进行回退修改。
时空立方体模型(Space-time cube)
时间立方体模型最早是由Hagerstrand于1970年提出,后来Rucker、Szego等进一步对其进行了探讨(Langran,1989)。时间立方体模型用二维坐标轴来表示现实世界的平面空间,用一维的时间轴来表示平面位置沿时间的变化,如图7-15所示。这样,由二维的几何位置和一维的时间就组成了一个三维的立方体。任意给定一个时间点,就可从三维的立方体中获取相应的截面,即现实世界的平面几何状态。时间立方体模型也可以扩展用以表达三维空间的时间变化过程。该模型的优点是对时间语义的表达非常直观,缺点是随着数据量的增加,对立方体的操作会变得越来越复杂,以至于最终变得无法处理。

时间体素模型
时间体素模型:Mulder(1993)则将时空划分为时间体素(chrono-voxel):(i,[x,y,z,t]),而将时空对象描述为由具有相同属性和特征的一个或多个相联的时间体素构成的特征对象:Object({Chrono-Voxel(i,[x,y,z,t])}),[property],[attribute])。
基于事件的时空模型(Event-based models)
由于基于状态或地理现象的时空模型(如序列快照模型)很难表达地理实体的个性变化或事件发生的时间特征,人们就想到用显式的方式来直接描述事件的时间变化特征,这就是基于事件的时空模型的基本思想。前述的基态修正和时空复合模型都属基于事件模型的范畴。
另外,Peuquet和Duan在1995年对基于事件的时空模型进行了较深入的研究(Pequet,Duan,1995),提出了一个基于栅格数据的面向事件的模型ESTDM(Event-based Spatiotemporal Data Model)。该模型由基态图和压缩存储的事件变化序列组成,该模型具有空间存储的高效性和时态检索的方便性。基于事件的时空模型非常适合诸如“在某一时间段某一地理区域中发生了什么事件”这类问题的查询,同时具有很好的数据内部一致性和较小数据冗余度。
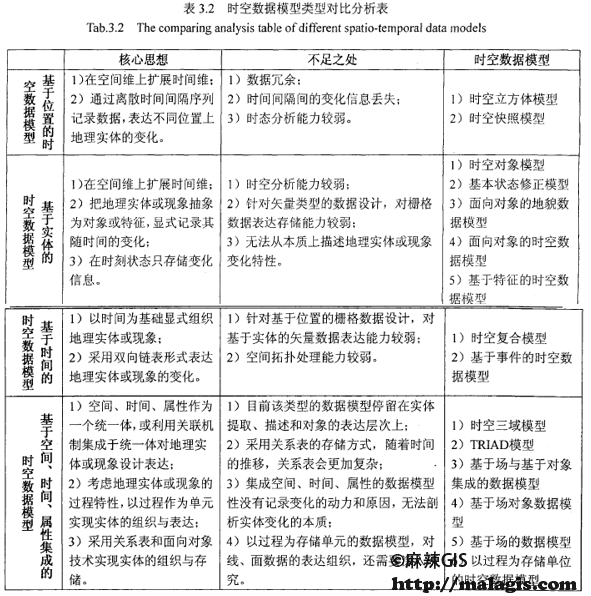
总结
相关阅读




声明
1.本文所分享的所有需要用户下载使用的内容(包括但不限于软件、数据、图片)来自于网络或者麻辣GIS粉丝自行分享,版权归该下载资源的合法拥有者所有,如有侵权请第一时间联系本站删除。
2.下载内容仅限个人学习使用,请切勿用作商用等其他用途,否则后果自负。









































您好,能问一下总结那部分的表是出自哪篇论文吗