
栅格数据数据结构
发布时间: 2014-01-25
所属分类: 地理信息系统(GIS)原理
所谓删格数据可以按照下面的方法描述:
将工作区域的平面表象按一定分解力作行和列的规则划分,形成许多格网,每个网格单元称为象素(pixel)。根据所表示实体的表象信息差异,各象元可用不同的“灰度值”来表示 。
若每个象元规定N比特,则其灰度值范围可在0到2^N—1之间;把白~灰色~黑的连续变化量化成8比特(bit),其灰度值范围就允许在0~255之间;若每个象元只规定1比特,则灰度值仅为0和1,这就是所谓二值图像。
点实体在栅格数据中表示为一个像元;线实体则表示为在一定方向上连接成串的相邻像元集合;面实体由聚集在一起的相邻像元集合表示。
示意图如下:
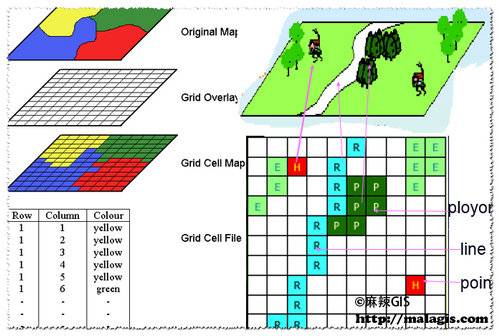
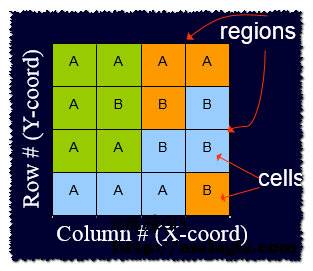
栅格数据结构实际上就是象元阵列,即象元按矩阵形式的集合(二维数组),栅格中的每个象元是栅格数据中最基本的信息存储单元,其坐标位置可以用行号和列号确定。右图在计算机内是一个4*4阶的矩阵。但在外部设备上,通常是以左上角开始逐行逐列存贮。存贮顺序为: A A A A A B B B A A B B A A A B ,当每个像元都有唯一一个属性值时,一层内的编码就需要m行×n列×3(x,y和属性编码值)个存储单元。
分辩率(resolution)
分辨率依靠栅格数目,分辨率的改变会影响地物的识别,经度,周长,面积等等。
相关阅读







声明
1.本文所分享的所有需要用户下载使用的内容(包括但不限于软件、数据、图片)来自于网络或者麻辣GIS粉丝自行分享,版权归该下载资源的合法拥有者所有,如有侵权请第一时间联系本站删除。
2.下载内容仅限个人学习使用,请切勿用作商用等其他用途,否则后果自负。
手机阅读
公众号关注
知识星球
手机阅读

最新GIS干货

私享圈子
上一篇:空间数据模型的类型
下一篇:栅格数据取值方法















![[WebGIS] HTML5跟踪GPS轨迹笔记汇总](http://image.malagis.com/pic/gis/2016-09-24_21_12_57_1474722777.75992.jpg?imageView2/1/w/100/h/70)




















看到个错误,应改为:若每个象元规定N比特,则其灰度值范围可在0到(2^N)-1之间;
https://wenku.baidu.com/view/47586b2525c52cc58bd6be77.html
谢谢指出,已修正。
请问:“当每个像元都有唯一一个属性值时,一层内的编码就需要m行×n列×3(x,y和属性编码值)个存储单元”这里面的3是怎么来的?
您好,问个问题,请问:“当每个像元都有唯一一个属性值时,一层内的编码就需要m行×n列×3(x,y和属性编码值)个存储单元”这里面的3是怎么来的呢?
3= (x + y + 属性编码值)
哦哦,谢谢,原来这还能相加呀