
GIS基础-DEM地形可视化中的层次细节模型
发布时间: 2014-07-21
所属分类: 数字高程模型(DEM)
层次细节模型,也称LOD模型(Level of Detail),是一种实时三维计算机图形技术,最先由Clark于1976年提出。
工作原理
视点离物体近时,能观察到的模型细节丰富;视点远离模型时,观察到的细节逐渐模糊。系统绘图程序根据一定的判断条件,选择相应的细节进行显示,从而避免了因绘制那些意义相对不大的细节而造成的时间浪费,同时有效地协调了画面连续性与模型分辨率的关系。
详细内容可以参考http://malagis.com/modeling-method-lod-3d-space-algorithm.html
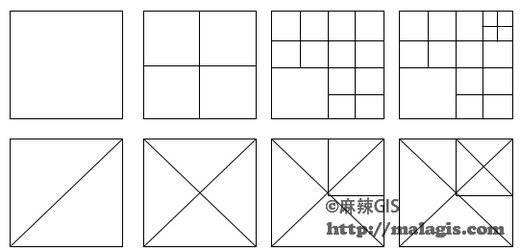
常见层次细节模型——四叉树
四叉树,递归地将地形分割成小的区块来逼近真实地形。
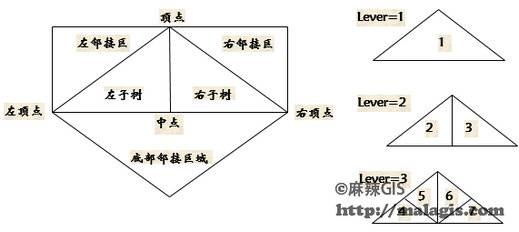
常见层次细节模型——ROAM
ROAM又称实时的最优自适应网格,是在对地形进行三维显示时,依据视点的位置和视线的方向等多种因素,对于表示地形表面的三角形片元进行一系列的基于三角形二叉剖分分裂与合并,最终形成和原始表面近似且无缝无叠的简化连续三角化表面。
相关阅读







声明
1.本文所分享的所有需要用户下载使用的内容(包括但不限于软件、数据、图片)来自于网络或者麻辣GIS粉丝自行分享,版权归该下载资源的合法拥有者所有,如有侵权请第一时间联系本站删除。
2.下载内容仅限个人学习使用,请切勿用作商用等其他用途,否则后果自负。
手机阅读
公众号关注
知识星球
手机阅读

最新GIS干货

私享圈子
上一篇:GIS基础-地表可视化技术之纹理




















](https://image.malagis.com/gis00/book-cover/80c2de31163499e85a9b90d6239eb9ac-g.jpg?imageView2/1/w/100/h/70)














