
GIS基础-分割合并算法生成D_三角网
发布时间: 2014-05-10
所属分类: 数字高程模型(DEM)
分割合并算法的基本思想
采用分而治之策略,将复杂问题简单化:
先将数据点分割成易于三角化的点子集(如每子集3、4个点),后对每个子集分别三角化,并由LOP优化成D_三角网;之后对每个子集的三角网进行合并,形成最终的D_三角网。
分割合并三角化算法如图所示:
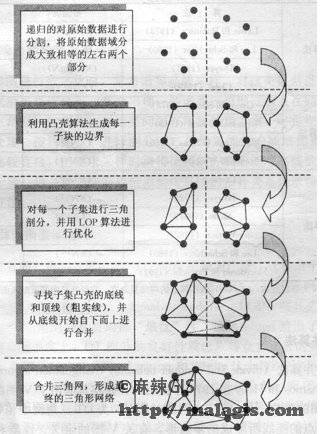
分割合并算法的步骤
STEP1
将数据集以横坐标为主、纵坐标为辅按升序排序。
STEP2
如数据集中点数大于阀值,则继续将数据集化为点个数近似相等的两个子集,并对每个子集做如下工作:
① 获取每子集的凸壳;
② 以凸壳为数据边界进行三角化,并用LOP优化成D三角网;
③ 找出连接左右子集两个凸壳的底线和顶线;
④ 由底线到顶线合并两个三角网。
STEP3
如数据集中点数不大于阀值,则直接输出三角剖分结果。
数据点集采用递归分割快速排序法;子集凸壳的生成可采用格雷厄姆算法(见后);子集三角化可采用任意方法,如子集最小到3或4个点则可直接三角剖分之;子网合并则需先找出左右子集凸壳的底线和顶线(算法见后),然后逐步合并三角剖分得到最终D三角网。
相关阅读







声明
1.本文所分享的所有需要用户下载使用的内容(包括但不限于软件、数据、图片)来自于网络或者麻辣GIS粉丝自行分享,版权归该下载资源的合法拥有者所有,如有侵权请第一时间联系本站删除。
2.下载内容仅限个人学习使用,请切勿用作商用等其他用途,否则后果自负。
手机阅读
公众号关注
知识星球
手机阅读

最新GIS干货

私享圈子




































